Boceto Final del Robot:

Vistas ortogonales del robot, sin la cubierta (Sólo la base con el parachoques y las ruedas)

Circuito Eléctrico:
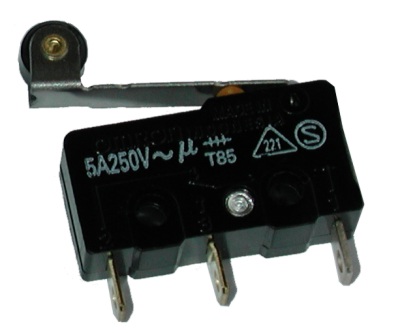
b) La idea clave del proyecto es conseguir que nuestro robot vaya alante y atrás sin tener que mover nosotros ninguna pieza, para ello cambiaremos la corriente eléctrica de nuestro circuito. Usaremos un dispositivo fin de carrera, con el que al accionarlo la corriente de nuestro circuito cambiará, accionando los leds que nosotros hayamos configurado y cambiando el sentido del motor (Alante, Detrás), el dispositivo se accionará gracias a nuestro parachoques deslizable, que al choque con un material se deslizará soltando o accionando el dispositivo.
c) Nuestro robot no puede tener dimensiones mayores a 30cm x 30cm x 30cm por lo que hemos decidido:
- Nuestra base tendrá unas dimensiones de 20cm x 20cm
- El parachoques sobresaldrá 5 cm de altura de la base para que se pueda deslizar.
- Las ruedas serán del mismo tamaño y serán tres, (tamaño mediano para que la rueda delante no roce)
- La altura todavía no está definida pero nuestra idea es que no supere los 25 cm de altura.
d)Materiales.
- 2 Tablas de madera.
- 3 ruedas.
- 2 Pilas de petaca.
- Motor
-Zumbador.
-Interruptor.
-Interruptor de fin de carrera.
-2 Leds rojos.
-2 Leds verdes.
-Estaño.
-Cables conductores.
-Pegamento termofusible.
e) Herramientas.
-Sierra
-Segueta.
-Pistola de pegamento.
-Soldador.
-Regla.
-Gato.
-Cuter.
-Tijeras.
f) Estas carecterísticas del diseño serán propuestas el día que toque diseñarlo.
Imágenes.